▓Ż┴¦▒Ł░ß▀\╬Õūįė╔Č╚ÖCąĄ╩ųįO(sh©©)ėŗ
- ╬─╝■ĮķĮBŻ║
- įō╬─╝■×ķ docx Ė±╩Į�����Ż¼Ž┬▌dąĶę¬ 20 ĘeĘų
-
- ▓Ż┴¦▒Ł░ß▀\╬Õūįė╔Č╚ÖCąĄ╩ųįO(sh©©)ėŗ─┐ õø
1 Šwšō 4
1.1 ÖCŲ„╚╦Ė┼╩÷ 4
1.2 ć°ā╚(n©©i)═Ō░l(f©Ī)š╣ĀŅør 4
1.3 ÖCąĄ╩ųĄ─ĮM│╔ 5
2 ÖCąĄ╩ų▒█Ą─┐é¾wĮY(ji©”)śŗ(g©░u)įO(sh©©)ėŗ 6
2.1 ÖCąĄ╩ųĄ─é„äėĘĮ░ĖįO(sh©©)ėŗ 6
2.2 ░ß▀\ÖCąĄ╩ųĮY(ji©”)śŗ(g©░u)ĘĮ░ĖįO(sh©©)ėŗ 6
2.3ūįė╔Č╚Ęų╬÷╝░┤_Č© 10
2.4 ÖCąĄ╩ųĄ─ų„ę¬╝╝ąg(sh©┤)ģóöĄ(sh©┤) 10
3 ░ß▀\ÖCąĄ╩ųĖ„▓┐╝■įO(sh©©)ėŗ����Īóėŗ╦Ń 12
3.1 ░ß▀\ÖCąĄ╩ų╩ų▓┐ĮY(ji©”)śŗ(g©░u)įO(sh©©)ėŗ╝░ėŗ╦Ń 12
3.2 ░ß▀\ÖCąĄ╩ų╩ų═¾ĮY(ji©”)śŗ(g©░u)įO(sh©©)ėŗ 14
3.3 ąĪ▒█ĮY(ji©”)śŗ(g©░u)įO(sh©©)ėŗ 18
3.4 ┤¾▒█ĮY(ji©”)śŗ(g©░u)įO(sh©©)ėŗ 21
3.5 č³▓┐ĮY(ji©”)śŗ(g©░u)įO(sh©©)ėŗ 22
4 ▌S║═▌S│ąĄ─įO(sh©©)ėŗ┼cąŻ║╦ 24
4.1░ß▀\ÖCąĄ╩ų▌SįO(sh©©)ėŗ┼cąŻ║╦ 24
4.2 ▌S│ąįO(sh©©)ėŗ┼cąŻ║╦ 28
5 ┐éĮY(ji©”) 30
6 ģó┐╝╬─½I 31
▓Ż┴¦Ų┐░ß▀\╬Õūįė╔Č╚ÖCąĄ╩ųįO(sh©©)ėŗ
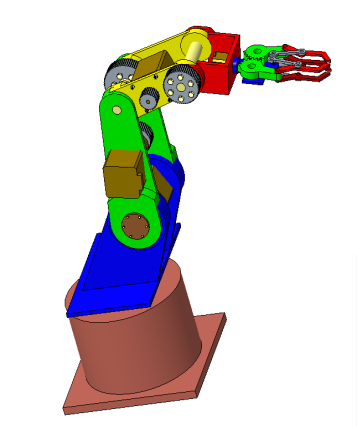
š¬ ę¬: ļSų°┐Ų╝╝▓╗öÓ░l(f©Ī)š╣Ż¼ÖCŲ„╚╦ęčĮø(j©®ng)▀M╚ļ╚╦éāęĢę░�Ż¼╠žäeį┌╣żśI(y©©)╔ŽĄ─æ¬(y©®ng)ė├ĪŻ¼F(xi©żn)┤·Ė„éĆīW┐Ų╝╝ąg(sh©┤)Ą─▓╗öÓ░l(f©Ī)š╣�����Ż¼░ß▀\ÖCąĄ╩ųĄ─æ¬(y©®ng)ė├ŅI(l©½ng)ė“ę▓┤¾┤¾═žš╣����ĪŻ░ß▀\ÖCąĄ╩ųį┌ūRäežø╬’║¾�����Ż¼═©▀^ęĢėXé„ĖąŲ„Æ▀├Ķ╣żū„Łh(hu©ón)Š│�����Ż¼Å─Č°½@Ą├öĄ(sh©┤)ō■(j©┤)����Ż¼ūįäėėŗ╦Ń│÷ūŅČ╠┬ĘÅĮ��Ż¼īŹ¼F(xi©żn)žø╬’ėąę╗Ąž░ß▀\ĄĮ┴Ēę╗Ąž��ĪŻÖCąĄ╩ųęčĮø(j©®ng)ėą╣żśI(y©©)Ž“╝ę═źĄ─░l(f©Ī)š╣┌ģä▌����ĪŻ▒Š«ģśI(y©©)įO(sh©©)ėŗīóįO(sh©©)ėŗę╗┼_╬Õūįė╔Č╚Ą─╣żśI(y©©)ÖCąĄ╩ųŻ¼ė├ė┌░ß▀\ąĪ╬’ŲĘŻ©└²╚ń▓Ż┴¦▒ŁŻ®��Ż¼ųž³cī”ÖCąĄ╩ųĄ─ÖCąĄĮY(ji©”)śŗ(g©░u)įO(sh©©)ėŗ����ĪŻ╩ūŽ╚Ż¼▒Š╬─ī”░ß▀\ÖCąĄ╩ų▀Mąą┐é¾wįO(sh©©)ėŗ����Ż¼┤_Č©įO(sh©©)ėŗĘĮ░ĖŻ╗╚╗║¾═©▀^▀xō±║Ž▀mĄ─é„äėĘĮ╩Į��Īó“ī(q©▒)äėĘĮ╩Į�����Ż╗ūŅ║¾įO(sh©©)ėŗÖCąĄ╩ųĄ─Ąūū∙�Īó╩ųĪó╩ų═¾��Īó┤¾ąĪ▒█Ą╚ĮY(ji©”)śŗ(g©░u)╝░│▀┤ń�����ĪŻīŹ¼F(xi©żn)ÖCąĄ╩ųĄ─ūŅ╗∙▒Š╣”─▄�����ĪŻ
ĻP(gu©Īn)µIį~Ż║╬Õūįė╔Č╚��Ż╗ÖCąĄ╩ų�Ż╗ĮY(ji©”)śŗ(g©░u)įO(sh©©)ėŗ
...
 ¤ßķTĻP(gu©Īn)µIį~Ż║
¤ßķTĻP(gu©Īn)µIį~Ż║ 

