 ¤ßķTĻP(gu©Īn)µIį~Ż║
¤ßķTĻP(gu©Īn)µIį~Ż║ 


- 1┼ŻŅ^┼┘┤▓═╣▌åÖC(j©®)śŗ(g©░u)įO(sh©©)ėŗ(j©¼)
- 2┼ŻŅ^┼┘┤▓ī¦(d©Żo)ŚUÖC(j©®)śŗ(g©░u)Ą─▀\(y©┤n)äėĘų╬÷
- 3┼ŻŅ^┼┘┤▓ī¦(d©Żo)ŚUÖC(j©®)śŗ(g©░u)ÖC(j©®)ąĄįŁ└Ēšn│╠įO(sh©©)ėŗ(j©¼)
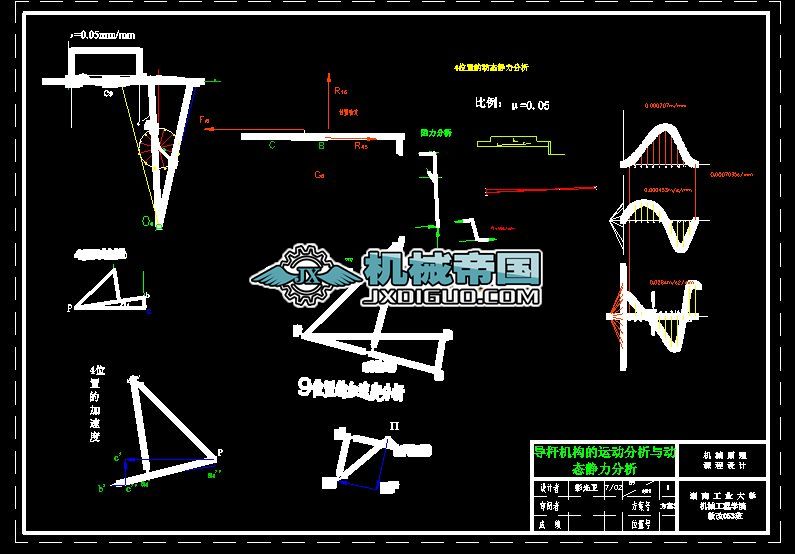
- 4┼ŻŅ^┼┘┤▓šn│╠įO(sh©©)ėŗ(j©¼)ĪŠexb+šf├„Ģ°Ī┐
- 5┼ŻŅ^┼┘┤▓Ą─ŠC║ŽįO(sh©©)ėŗ(j©¼)┼cĘų╬÷ĪŠČ■ŠS╚²ŠS+šf├„Ģ°
- 6┼ŻŅ^¾wčb┼õłD
- 7┼ŻŅ^┼┘┤▓ÖC(j©®)ąĄįO(sh©©)ėŗ(j©¼)
- 8┼ŻŅ^┼┘┤▓STP
- 9┼ŻŅ^┼┘┤▓═Ųäė╝▄Ń@”Ą16┐ūŖAŠ▀CADłD╝ł
- 10┼ŻŅ^┼┘┤▓Ą─įO(sh©©)ėŗ(j©¼)
Ė³ČÓ..ŽÓĻP(gu©Īn)╬─Ön
Ė³ČÓ..ūŅą┬╬─Ön