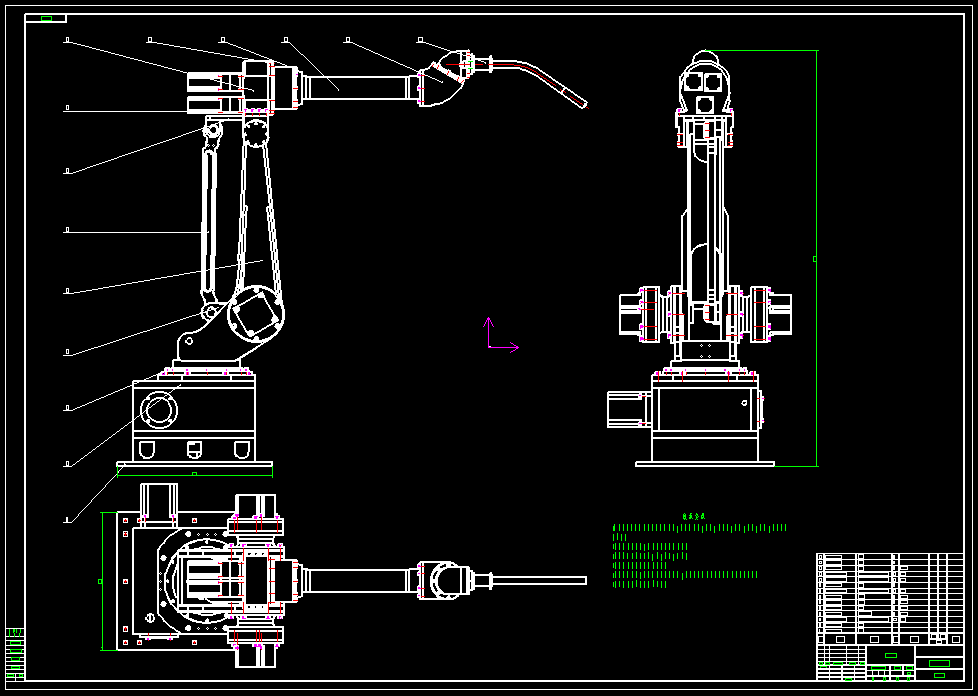
焊接機器人結(jié)構(gòu)設(shè)計
- 文件介紹:
- 該文件為 rar 格式�,下載需要 20 積分
-
- 焊接機器人結(jié)構(gòu)設(shè)計目 錄
摘 要 V
1 緒 論 1
1.1 工業(yè)機器人概述 1
1.2 課題研究背景及其意義 1
1.3 國內(nèi)外研究現(xiàn)狀及發(fā)展趨勢 3
1.3.1 國外發(fā)展現(xiàn)狀與趨勢: 3
1.3.2 國內(nèi)發(fā)展現(xiàn)狀與趨勢: 4
1.4 工業(yè)機器人相關(guān)技術(shù) 5
1.5 本文主要內(nèi)容 6
2 總體方案與傳動機構(gòu)設(shè)計 8
2.1 總體方案設(shè)計與分析 8
2.1.1 驅(qū)動方式選擇 9
2.2 傳動方案的初步設(shè)計 10
2.2.1 腕關(guān)節(jié)的傳動結(jié)構(gòu)設(shè)計 10
2.2.2 小臂傳動機構(gòu) 11
2.2.3 大臂傳動機構(gòu) 11
2.2.4 腰身傳動機構(gòu) 12
2.3 機器人部分技術(shù)參數(shù) 12
3.1 工作空間 14
3.2 工作空間與機器人結(jié)構(gòu)尺寸的相關(guān)性 14
3.2 分析 16
4 結(jié)構(gòu)設(shè)計 17
4.1 傳動方案的確定 17
4.2 手腕傳動 17
4.2.1 腕部的設(shè)計要求 17
4.2.2 腕部電機的選擇 17
4.3 腰部 18
4.3.1 底座及腰部設(shè)計要求 18
4.3.2 電機選擇 18
4.4 手臂 19
4.4.1 手臂作用概述 19
4.4.2 電機選擇 19
4.5 傳動結(jié)構(gòu)設(shè)計計算 20
5 關(guān)鍵零部件的校核 25
5.1 腕部中心軸的結(jié)構(gòu)設(shè)計與校核 25
5.1.1 確定腕部中心軸的材料以及各段直徑和長度 25
5.1.2 腕部中心軸的強度校核 25
5.2 腕部中心軸2的結(jié)構(gòu)設(shè)計與校核 27
5.2.1 腕部中心軸2的結(jié)構(gòu)設(shè)計 27
5.2.2 腕部中心軸2的強度校核 28
5.3 手腕齒輪連接軸的結(jié)構(gòu)設(shè)計與校核 28
5.3.1 手腕齒輪連接軸的結(jié)構(gòu)設(shè)計 28
5.3.2 手腕齒輪連接軸的強度校核 29
5.4 手腕齒輪連接軸2的結(jié)構(gòu)設(shè)計與校核 31
5.5 驅(qū)動臂座與腰部主軸連接螺釘?shù)男:?#160; 31
5.6 部分三維圖 31
6 總結(jié) 34
附錄 35
參考文獻 46...
 熱門關(guān)鍵詞:
熱門關(guān)鍵詞: 

