šµ┐š╬³┴ŽÖCųŲŻ©ÖCąĄ╩ųŻ®įO(sh©©)ėŗ─Żą═
- ╬─╝■ĮķĮBŻ║
- įō╬─╝■×ķ rar Ė±╩ĮŻ¼Ž┬▌dąĶę¬ 10 ĘeĘų
-
- šµ┐š╬³┴ŽÖCųŲŻ©ÖCąĄ╩ųŻ®įO(sh©©)ėŗ╚²ŠS╠ūłD
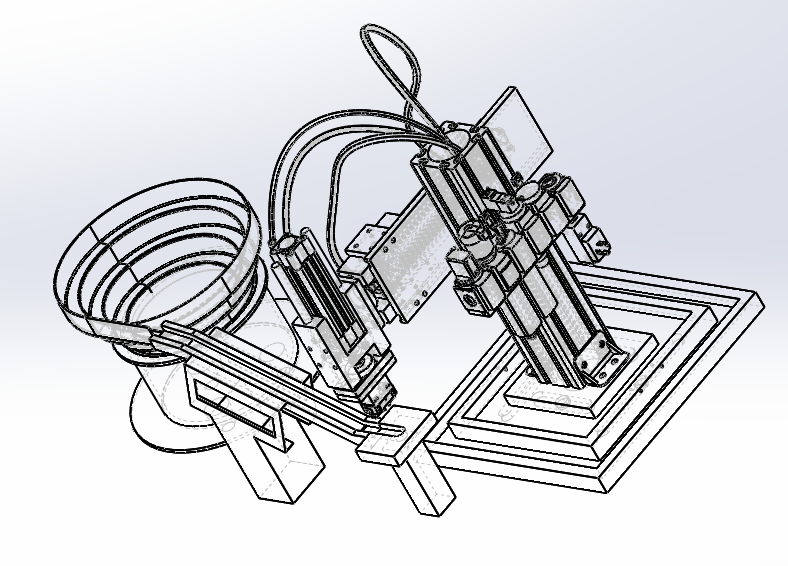
šµ┐š╬³┴ŽÖCųŲŻ©ÖCąĄ╩ųŻ®įO(sh©©)ėŗ─Żą═ų„ę¬ė╔╩ų▓┐�Īó▀\äėÖCśŗ(g©░u)║═┐žųŲŽĄĮy(t©»ng)╚²┤¾▓┐ĘųĮM│╔ĪŻ╩ų▓┐╩Ūė├üĒūź│ų╣ż╝■Ż©╗“╣żŠ▀Ż®Ą─▓┐╝■�Ż¼Ė∙ō■(j©┤)▒╗ūź│ų╬’╝■Ą─ą╬ĀŅĪó│▀┤ń�Īóųž┴┐Īó▓─┴Ž║═ū„śI(y©©)ę¬Ū¾Č°ėąČÓĘNĮY(ji©”)śŗ(g©░u)ą╬╩Į�Ż¼╚ńŖA│ųą═Īó═ą│ųą═║═╬³ĖĮą═Ą╚�ĪŻ▀\äėÖCśŗ(g©░u)Ż¼╩╣╩ų▓┐═Ļ│╔Ė„ĘN▐D(zhu©Żn)äėŻ©ö[äėŻ®�ĪóęŲäė╗“Å═(f©┤)║Ž▀\äėüĒīŹ¼F(xi©żn)ęÄ(gu©®)Č©Ą─äėū„Ż¼Ė─ūā▒╗ūź│ų╬’╝■Ą─╬╗ų├║═ū╦ä▌�ĪŻ▀\äėÖCśŗ(g©░u)Ą─╔²ĮĄĪó╔ņ┐s�Īóą²▐D(zhu©Żn)Ą╚¬Ü┴ó▀\äėĘĮ╩ĮŻ¼ĘQ×ķÖCąĄ╩ųĄ─ūįė╔Č╚�ĪŻ×ķ┴╦ūź╚Ī┐šķgųą╚╬ęŌ╬╗ų├║═ĘĮ╬╗Ą─╬’¾w�Ż¼ąĶėą6éĆūįė╔Č╚...
 ¤ßķTĻP(gu©Īn)µIį~Ż║
¤ßķTĻP(gu©Īn)µIį~Ż║ 

